Completed
Facial Recognition Servo Tracker
Built an OpenCV face-tracking system that drives two servo motors in real time via MQTT — hardware designed in Fusion 360 and 3D printed.
Coding Electronics Robotics 3D Modeling
A system that detects a face via webcam and physically moves two servo motors to track it — simulating an animatronic eye mechanism.
How It Works
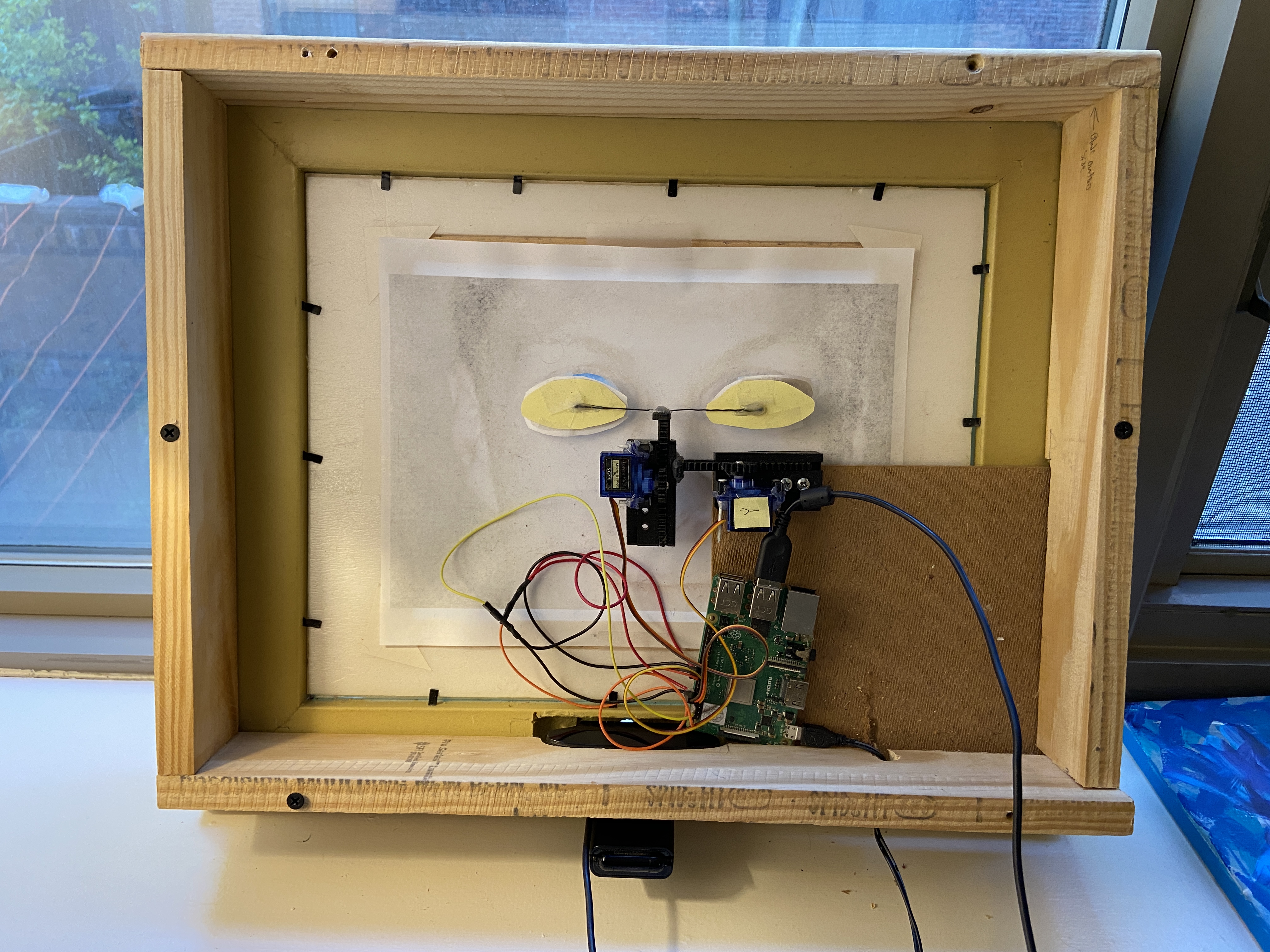
A Python script on a laptop uses OpenCV to detect faces from a Logitech webcam in real time. The laptop publishes tracking coordinates over MQTT to a Raspberry Pi, which drives two servo motors used as linear actuators for the eye movement.
The hardware — servo mounts, arm pieces, and gears — was designed in Fusion 360 and 3D printed.
Stack
- Python + OpenCV for face detection
- MQTT for laptop → Raspberry Pi communication
- Raspberry Pi GPIO for servo control
- Fusion 360 + FDM 3D printing for the enclosure